Metoda Elementów Skończonych
B. Górecki
Pliki do wykorzystania w poniższym ćwiczeniu można pobrać za pomocą poniższych linków:
- Plik nagłówkowy meslib.h
- Plik źródłowy meslib.cpp
- Plik nagłówkowy winbgi2.h
- Plik źródłowy winbgi2.cpp
Wprowadzenie
Niniejszą instrukcją rozpoczynamy cykl laboratoriów, z których każde kolejne będzie rozwinięciem poprzedniego i wnioski z poprzedniego będą stanowiły motywację do zastosowania kolejnych metod. Tym samym należy zadbać o to, aby zadania z każdego laboratorium były wykonywane do końca czy to na zajęciach, czy w domu. Dziś zaznajomimy się ze sformułowaniem metody elementów skończonych dla jednego elementu czworokątnego. Dla uproszczenia nie będziemy stosować transformacji geometrycznych występujących w rzeczywistym sformułowaniu metody elementów skończonych, więc faktycznie będziemy operować zawsze na jednostkowych elementach kwadratowych.
Sformułowanie algebraiczne dla jednego elementu
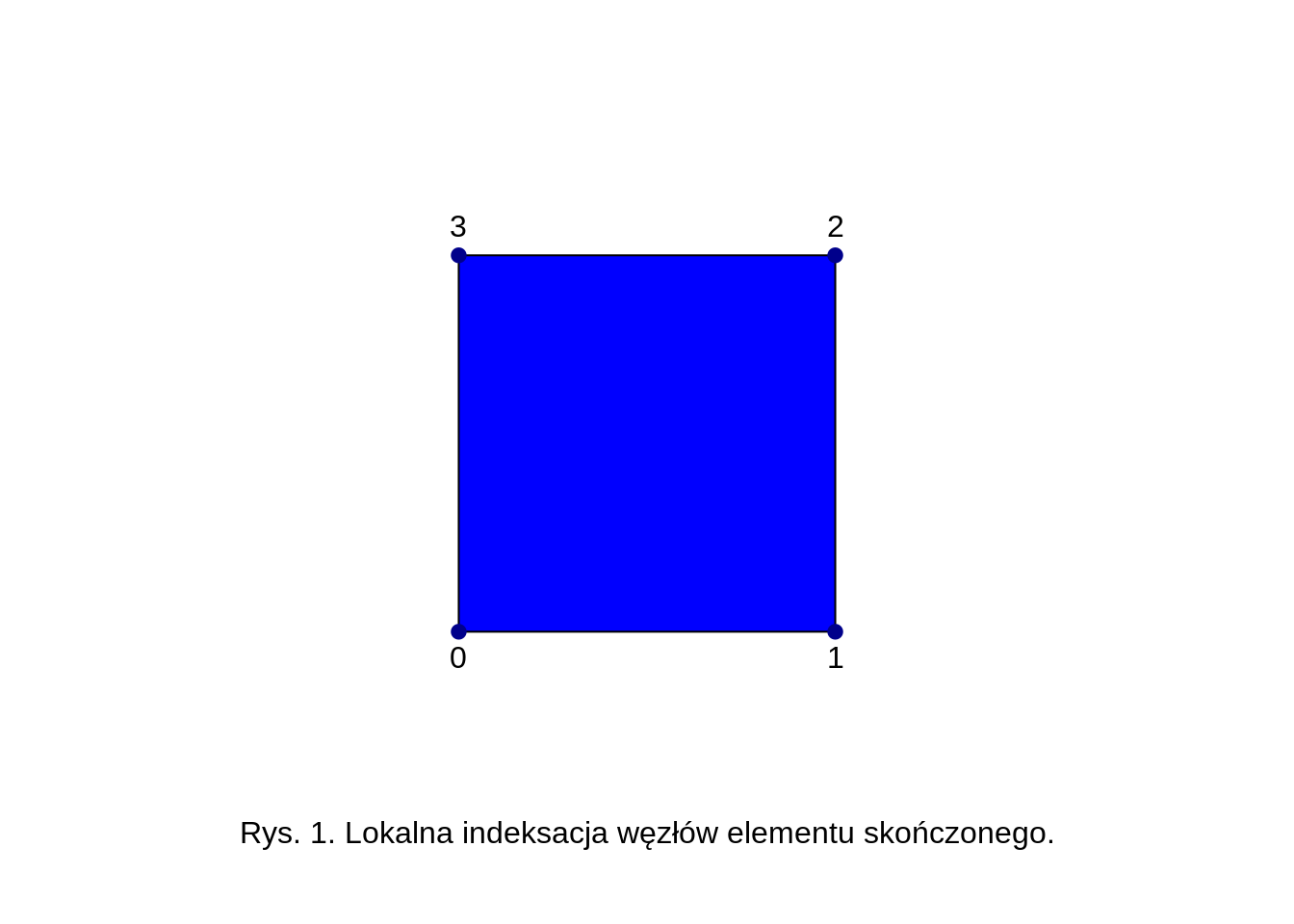
Zagadnienie wytrzymałości konstrukcji dla jednego elementu skończonego ma następujące sformułowanie algebraiczne: Elementowi skończonemu przypisana jest tzw. macierz sztywności \(\mathbf{K}\) reprezentująca jego sztywność na poszczególne rodzaje odkształceń (przesunięcia jego wierzchołków), wektor przesunięć \(\mathbf{d}\), jakim ulegną poszczególne wierzchołki elementu pod obciążeniem oraz wektor sił węzłowych \(\mathbf{f}\) reprezentujący odpowiednio przeliczone siły (bądź obciążenia ciągłe) przyłożone do węzłów elementu. \[ \mathbf{K} \mathbf{d} = \mathbf{f} \] Wektor przesunięć (ang. displacement) zawiera odpowiednio przesunięcia względem osi \(x\) oraz \(y\) kolejnych węzłów elementu (numeracja węzłów pokazana jest na Rys. 1). Wektor sił węzłowych \(\mathbf{f}\) ma analogiczną postać. Poniżej przedstawiona jest również macierz sztywności \(\mathbf{K}\). \[ \mathbf{d} = \left[ \begin{array}{c} x_0 \\ y_0 \\ x_1 \\ y_1 \\ x_2 \\ y_2 \\ x_3 \\ y_3 \\ \end{array} \right] \quad \quad \quad \mathbf{f} = \left[ \begin{array}{c} f_{x_0} \\ f_{y_0} \\ f_{x_1} \\ f_{y_1} \\ f_{x_2} \\ f_{y_2} \\ f_{x_3} \\ f_{y_3} \\ \end{array} \right] \] \[ \mathbf{K} = \frac{E}{1-\nu^2} \left[ \begin{array}{c c c c c c c c} \frac{1}{2} - \frac{\nu}{6} & \frac{1}{8} + \frac{\nu}{8} & -\frac{1}{4} - \frac{\nu}{12} & -\frac{1}{8} + \frac{3}{8}\nu & -\frac{1}{4} + \frac{\nu}{12} & -\frac{1}{8} - \frac{\nu}{8} & \frac{\nu}{6} & \frac{1}{8} - \frac{3}{8}\nu \\ \frac{1}{8} + \frac{\nu}{8} & \frac{1}{2} - \frac{\nu}{6} & \frac{1}{8} - \frac{3}{8}\nu & \frac{\nu}{6} & -\frac{1}{8} - \frac{\nu}{8} & -\frac{1}{4} + \frac{\nu}{12} & -\frac{1}{8} + \frac{3}{8}\nu & -\frac{1}{4} - \frac{\nu}{12} \\ -\frac{1}{4} - \frac{\nu}{12} & \frac{1}{8} - \frac{3}{8}\nu & \frac{1}{2} - \frac{\nu}{6} & -\frac{1}{8} - \frac{\nu}{8} & \frac{\nu}{6} & -\frac{1}{8} + \frac{3}{8}\nu & -\frac{1}{4} + \frac{\nu}{12} & \frac{1}{8} + \frac{\nu}{8} \\ -\frac{1}{8} + \frac{3}{8}\nu & \frac{\nu}{6} & -\frac{1}{8} - \frac{\nu}{8} & \frac{1}{2} - \frac{\nu}{6} & \frac{1}{8} - \frac{3}{8}\nu & -\frac{1}{4} - \frac{\nu}{12} & \frac{1}{8} + \frac{\nu}{8} & -\frac{1}{4} + \frac{\nu}{12} \\ -\frac{1}{4} + \frac{\nu}{12} & -\frac{1}{8} - \frac{\nu}{8} & \frac{\nu}{6} & \frac{1}{8} - \frac{3}{8}\nu & \frac{1}{2} - \frac{\nu}{6} & \frac{1}{8} + \frac{\nu}{8} & -\frac{1}{4} - \frac{\nu}{12} & -\frac{1}{8} + \frac{3}{8}\nu \\ -\frac{1}{8} - \frac{\nu}{8} & -\frac{1}{4} + \frac{\nu}{12} & -\frac{1}{8} + \frac{3}{8}\nu & -\frac{1}{4} - \frac{\nu}{12} & \frac{1}{8} + \frac{\nu}{8} & \frac{1}{2} - \frac{\nu}{6} & \frac{1}{8} - \frac{3}{8}\nu & \frac{\nu}{6} \\ \frac{\nu}{6} & -\frac{1}{8} + \frac{3}{8}\nu & -\frac{1}{4} + \frac{\nu}{12} & \frac{1}{8} + \frac{\nu}{8} & -\frac{1}{4} - \frac{\nu}{12} & \frac{1}{8} - \frac{3}{8}\nu & \frac{1}{2} - \frac{\nu}{6} & -\frac{1}{8} - \frac{\nu}{8} \\ \frac{1}{8} - \frac{3}{8}\nu & -\frac{1}{4} - \frac{\nu}{12} & \frac{1}{8} + \frac{\nu}{8} & -\frac{1}{4} + \frac{\nu}{12} & -\frac{1}{8} + \frac{3}{8}\nu & \frac{\nu}{6} & -\frac{1}{8} - \frac{\nu}{8} & \frac{1}{2} - \frac{\nu}{6} \\ \end{array} \right] \]
Macierz sztywności elementu \(\mathbf{K}\), dopóki nie zostaną na układ narzucone więzy unieruchamiające układ w przestrzeni jako ciało sztywne, jest osobliwa. Aby móc obliczyć przemieszczenia węzłów elementu pod działaniem określonych sił, nakładamy najpierw więzy. Załóżmy, że w naszym przypadku będą to więzy zamurowania lewego brzegu elementu, tzn. \(x_0 = y_0 = x_3 = y_3 = 0\). W postaci macierzowej powyższe cztery równania są równoznaczne z zastąpieniem wierszy o indeksach \(0\), \(1\), \(6\) i \(7\) jedynkami na głównej diagonali macierzy i przypisaniu zer na tych indeksach w wektorze prawej strony. Po narzuceniu więzów macierz nie jest już osobliwa i można rozwiązać układ choćby procedurą Gaussa.
Zadania
- Napisz program, w którym zaalokujesz pamięć na:
- globalną macierz sztywności \(\mathbf{Kg}\) (uzupełniona macierz
sztywności elementu \(\mathbf{K}\) jest
już w bibliotece
meslib), - wektor przemieszczeń węzłowych \(\mathbf{d}\),
- wektor prawych stron \(\mathbf{f}\),
- wektor więzów \(\mathbf{fix}\) do narzucenia warunków brzegowych.
- globalną macierz sztywności \(\mathbf{Kg}\) (uzupełniona macierz
sztywności elementu \(\mathbf{K}\) jest
już w bibliotece
- Uzupełnij zaalokowane tablice.
- Odbierz wszystkie stopnie swobody po lewej stronie elementu.
- Jako wymuszenie przyłóż siłę ciągnącą w dół prawy dolny węzeł.
- Rozwiąż zagadnienie metodą Gaussa i narysuj odkształcony element.
- Zmodyfikuj w programie obciążenie: przyłóż siłę skierowaną pionowo w dół do obu węzłów na prawej krawędzi. Rozwiąż zadanie.
- Przyłóż siły, które rozciągną element i rowiąż zadanie.
- Sprawdź wpływ współczynnika Poissona na rozwiązanie.
- Sprawdź różne modyfikacje programu, aby zaznajomić się z zadawaniem obciążeń i ruchami poszczególnych stopni swobody.
- Zmień sposób zamurowania na inny.
- Sprawdź, co się stanie z rozwiązaniem, gdy w ogóle nie narzucisz warunków brzegowych lub nie w pełni odbierzesz sztywne stopnie swobody układu.
- Spróbuj stworzyć teraz belkę składającą się z dwóch elementów skończonych.
Wskazówki implementacyjne
- Elementy w belce mają być indeksowane od \(0\) do \(MX*MY-1\), poczynając od elementu w lewym dolnym rogu i indeksując je po kolei w prawo. Po dojściu do końca belki, zaczynamy od lewego brzegu analogicznie indeksować kolejnymi liczbami elementy w pasie położonym o jeden element wyżej niż dopiero co indeksowany pas. W identyczny sposób indeksowane są węzły. Takiego indeksowania wymaga uproszczenie implementacji (brak transformacji geometrycznej macierzy sztywności) oraz prostota obecnej funkcji do rysowania całego układu.
MXiMYoznaczają odpowiednio liczbę elementów w poziomie i w pionie w prostokątnej belce. Muszą to być zmienne globalne.- Funkcja do rysowania
drawwymaga podania wskaźnikaint *do tablicyfixo długości równej liczbie stopni swobody w siatce \(N = 2(MX+1)(MY+1)\). Jeśli na danej pozycji w tablicy stoi zero, przyjmujemy, że ten stopień swobody ulega przemieszczeniom. Wpisanie na danym miejscu wartości \(1\), oznacza, że stopień swobody o tym indeksie jest odebrany (tak układ zostanie narysowany przez procedurę rysującądraw). Tablicęfixnależy także wykorzystać do narzucenia więzów na globalną macierz sztywności. - Początek głównego pliku z kodem programu powinien mieć następującą
postać. Poniższy przykład pokazuje też sposób użycia biblioteki
meslibw celu narysowania rozwiązanego układu.
#define _CRT_SECURE_NO_WARNINGS
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include "meslib.h"
#include "winbgi2.h"
int MX = 1; // liczba elementow w poziomie
int MY = 1; // liczba elementow w pionie
int N = 2 * (MX + 1) * (MY + 1); // calkowita liczba stopni swobody
int main()
{
// deklaracja wskaznika i alokacja tablicy wiezow
int *fix;
fix = (int*) calloc(N, sizeof(int));
if (fix == NULL) {
perror("main (fix)");
exit(1);
}
// pozostale deklaracje i alokacje pamieci
// uzupelnienie globalnej macierzy sztywnosci oraz wektorow wiezow i sil
// modyfikacja ukladu r-n ze wzgledu na wiezy
// rozwiazanie ukladu za pomoca funkcji gauss
// rysowanie rozwiazania
graphics(700, 700);
scale(0, 0.5 * (MY - MX - 3), MX + 3, 0.5 * (MY + MX + 3));
title("X", "Y", "MES");
draw(d, f, fix);
wait();
// zwolnienie pamieci
free(fix);
return 0;
}Krótka dokumentacja biblioteki meslib
Biblioteka meslib została stworzona na potrzeby
laboratorium, aby uprościć i przyspieszyć implementację metody elementów
skończonych. Zawiera szereg prostych i przydatnych funkcji oraz macierz
sztywności i macierz masową pojedynczego elementu. Poniżej krótko
opiszemy poszczególne funkcje:
int P(int id_x, int id_y, int dir)- funkcja, która zwraca globalny indeks stopnia swobody przy założeniu, żeid_xto jego indeks w kierunku \(x\) (liczony od \(0\) na lewej krawędzi),id_yto jego indeks w kierunku osi \(y\) (liczony od \(0\) na dolnej powierzchni belki), adirto \(0\) lub \(1\) zależnie od tego czy interesuje nas stopień swobody w kierunku poziomym, czy pionowym.int Q(int id_x, int id_y)- funkcja zwracająca globalny indeks elementu przy założeniu, że jest to element o indeksieid_xw kierunku poziomym i o indeksieid_yw kierunku pionowym.int DOF(int elid_x, int elid_y, int locdofid)- funkcja zwracająca globalny indeks stopnia swobody przy założeniu, żeelid_xoznacza indeks elementu w kierunku poziomym,elid_yindeks elementu w kierunku pionowym, alocdofidto liczba od \(0\) do \(7\) oznaczająca lokalny indeks danego stopnia swobody.
Lokalna indeksacja stopni swobody jest następująca: w węźle o indeksie \(0\) przesunięcia w kierunku poziomym i pionowym to odpowiednio \(0\)-wy i \(1\)-szy stopień swobody, w węźle o indeksie \(1\) występują \(2.\) i \(3.\) stopień swobody itd.- Lokalna macierz sztywności jest zdefiniowana w dwuwymiarowej tablicy
K[8][8]. Przy składaniu macierzy sztywności powinna być w programie przemnożona przez czynnikMdzawierający wpływ modułu Younga oraz współczynnika Poissona oraz przez grubość elementu. - Lokalna macierz masowa jest zdefiniowana w dwuwymiarowej tablicy
M[8][8]. Przy składaniu globalnej macierzy masowej powinna być w programie przemnożona przez czynnikMmzawierający wpływ gęstości materiału oraz dodatkowo należy ją przemnożyć przez grubość elementu. void gauss(int n, double **M, double *f, double *x)- procedura eliminacji Gaussa rozwiązująca układ równań o macierzy zapisanej w dynamicznie zaalokowanej dwuwymiarowej tablicyMo wymiarzen, i wektorze prawej stronyf. Wynik zostanie wpisany do miejsc w pamięci wskazywanych przez wskaźnik*x.void gauss_psp(int tabsize, double **A_ext, double *b_ext, double *x)- procedura eliminacji Gaussa z wyborem częściowym elementu głównego (ang. partial scaled pivoting). Metoda zmniejsza propagację błądów numerycznych i pozwala odwracać większą klasę macierzy.void draw(double *p, double *f, int *fix)- funkcja rysująca cały układ odkształconych elementów.* pto wskaźnik na tablicę przesunięć poszczególnych stopni swobody,* fto wskaźnik na tablicę sił węzłowych w tych stopniach swobody a* fixto wskaźnik na tablice więzów.